��Դ�����й������о���
���ߣ���ҫ�� ����ά ������ Ī�� ��־ǿ ����
����ǰ�ؿƼ�����Ӧ���ھ���������������ϵͳ��Ϊ�ִ�ս������Ҫ��ɲ��֣�������Ҫ����ǿ�����߶�������������ϵͳ�����ھ��������Ӧ�ã���δ������������ϵͳ�����Ӱ����ս��ʽ���߸�ս��������������ϵͳ��Ϊǰ�ؿ�ѧ���������˹����ܡ����ܻ����ˡ����ܸ�֪�����ܼ���ȣ��ļ�����ߣ��������һ�����ҿƼ�ʵ������߷�չˮƽ�����ԣ�����������ϵͳ����չ�о��ܼ�����ƶ����о��¡���������ķ�չ��
��ǰ������ϵͳװ�����ھ��³�ͻ��ո¶ͷ�ǣ����磬���������������ǵij�ͻ�У����������ÿվ�װ���İ���-S�ͳ���ʱ���˻��Ͱ�������TB-2���һ�������˻����������������������˴��������˹������Ҳ�����������Ǿ��ڵ���װ�����������б�ը������˻�������»���չ���˼�Ⱥʽ������2020�꣬��������һ��MQ-9“�ո���”���˻�Ϯ�������ʸ�����ָ�ӹٲ�ʹ�䵱��������������ս���ڵ�������������ϵͳ��Ϊδ��ս���Ĺؼ�����������������ս����ʤ��������

��չ��������ϵͳ�������ƶ����о��¿Ƽ�������������������������ÿƼ����ǻ��Է�չ���������ܽ�ͨϵͳ���ǻۼҾ�ϵͳ����������ϵͳ������ҽ��ϵͳ�ȡ�Ϊ�˸��ӿ�ѧ�����ٵط�չ��������ϵͳ�����Ƽ�����׳�̨��һϵ���й���������ϵͳ��չ�Ĺ滮��·�ߣ���������������ϵͳ����ķ�չ�������Ȼ�����ȡ�Ƹߵ㡣��ص�����������������ϵͳ�ۺ�·��ͼ������˹�Ĺ�������װ���ƻ���Ӣ���Ĺ������¼�����ܡ��й�����һ���˹����ܷ�չ�滮�Լ��ձ����г��ڼ����滮�ȡ�
���������ӿ��е��ռ䡢��½�ص����������͵���������ϵͳ����ӿ�֣������ǿ���Ѿ�����������ϵͳ�������У�������һЩ������ͻ������ս���У���������ϵͳ�Ĺؼ������������ӡ���ˣ����Ľ��ص��δ��ս���ľ����������������δ��ս�����ٵ�ʵ�ʸ��ӻ�������ս��������������ϵͳ��չ��Ӧ������Ĺؼ����������Ӿ��½Ƕȷ���������ǿ�뼯Ⱥ��ǿ�ؼ�������������������ϵͳ�ķ�չ���ơ�
һ���������о���״
��������ϵͳ�����������ã�Ŀǰ���о��д��ڳ����Σ�������Ҳδ�γ�ͳһ�Ķ��壬���ҽ��䶨��Ϊ��������ƽ̨�����ɸ���������ɣ����и�֪��������ѧϰ�����������ܹ�����֪ʶ���������������������ߣ��Ӷ����Ŀ����л����塣��������ϵͳ���������õĿռ䷶Χ�����Ի���Ϊ½������ϵͳ����������ϵͳ�ͺ�������ϵͳ���֡����У�½������ϵͳ��Ҫ����������˳����������˳�����ս���˳����������˳����ű����˳������˳������ָ��ϵͳ�ȣ���������ϵͳ��Ҫ����������˻�����ս���˻��������������˻��Լ����˻���ӵȣ���������ϵͳ��Ҫ�����������ͧ����ս����ͧ��������������ͧ��Ѳ���Ѿ�����ͧ���������DZ��������ս����DZ�����Լ�����֧��ϵͳ�ȡ����ڽ�������3���������Թ�������������ϵͳ���о���״���в�����
1.������������ϵͳ�о���״
��1��½������ϵͳ
½������ϵͳ��Ҫ�����鱨�Ѽ������Ѳ�ߡ�ɨ�׳��ϡ����������ս����Ԯ���������䡢ͨ���м��Լ����Ӹ��ŵ���������½������ϵͳ��ս���е����������ԣ��������о������ܵ������Ĺ㷺��ע��
��������1993��11������“����ս�����˳�”��Ŀ��Ҳ��“�Ƕ�ʿ”������սƽ̨��Ŀ��ǰ����2006�꣬���������“�Ƕ�ʿ”������սƽ̨ȫϵͳ����ƣ�����2007����ʽװ������½ս�ӡ�“�Ƕ�ʿ”ս��������սƽ̨�������ϵ�1�����;��ս����ƽ̨�����صĴ�����ϵͳ����/ҹ�������GPS��λϵͳ�Լ���ѧ�뼤������ϵͳ�ȣ���װ���л�ǹ�����ǹ�����ᵯ���ѻ�ϵͳ����������̽��ϵͳ�ȣ������ڲ�ͬ�������͵�����ִ����졢����������̽�⡢ͻ���ϰ������ѻ��֡����������ֱ�����������
“�Ƕ�ʿ”������սƽ̨�����и������������̣���Ը�ƽ̨���������˱�Яʽ�ֳֿ���ϵͳ����Χ�Ƹÿ���ϵͳ�Ŀ������ԡ����绥�����ԡ�С�ͻ�����ݼ�㻯�ȼ������������һϵ�п�������������“�Ƕ�ʿ”������սƽ̨��װ��������������ִ������������Բ������Զ����������ϵͳ���ٵĸ��Ž϶ࡣ�����⣬����½��Ҳ������һЩ������½������ϵͳ����“Ы��”�����ˡ�“ħצ”�����˵ȡ�2017�꣬����½���ƶ��ˡ�������������ϵͳ��RAS��ս�ԡ���Ϊ��չ������ս���������ṩ�˶���滮��ͼ1��ʾΪ����½������ϵͳ��
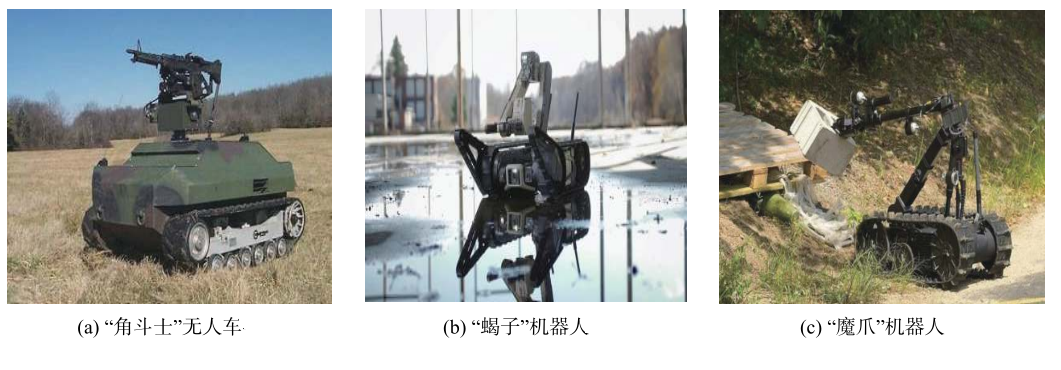
ͼ1 ����½������ϵͳ
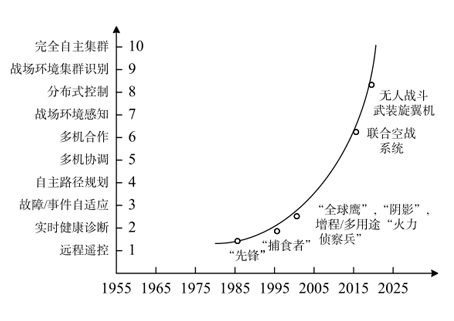
��ɫ�С�����˹��Ӣ���͵¹�Ҳ��̽�����½������ϵͳ�����ƹ��������з�����һϵ���Ƚ��IJ�Ʒ����Ʒ�б����1��ʾ�����磬��ɫ���з���“�ػ���”ϵ���������˳����Խ�ϴ��صĴ��������ں��㷨�����������ʶ��Σ���ϰ���ִ��Ѳ�ߡ�������С��ģ�Ļ������������˹���Ƶ�MARSA-800���˳�����ִ������ͺ��ڱ����Լ����ټ��ӵ�����������ִ������Ĺ�����ʵ������·���滮������ϰ��������˳�����������ս�����в���Ӣ���͵¹���½������ϵͳ���о�Ҳ��չ�ý��磬Ӣ����������60������Ƴ������Ƴ��ű������ˣ��������Ƴ�HarrisT7�������������ˣ�����ִ�в��ű���Σ�����¹����������˾������“�����ʦ”������װ������˳���Ҫ����ִ��ս�����ӡ�Σ�����⡢ҽ�ƺ��͡�ͨ���м��Լ�����֧Ԯ����
��1 ����½������ϵͳ
��2����������ϵͳ
��������ϵͳ��Ҫ�Ե������˻�ƽ̨�����˻���ȺΪ�������˻����ھ�����Ұ�������������ɡ��豸�����Ժõ��ŵ㣬���㷺Ӧ���ھ��������ڽ������ľ��³�ͻ�����˼�������á���������ϵͳ����Ҫ���ܰ������鱨�Ѽ��������ӡ��ն��л���Ŀ����١�ս���������о�Ԯ�ȡ�
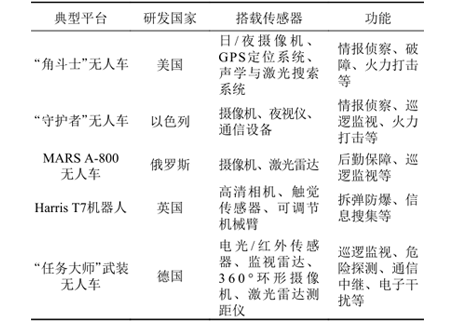
�����վ��о�ʵ������2000�������������˻�������ս�ĸ���������˻��������̶Ƚ������������壬�ƶ��˷�չ�滮�����˻������̶����������뷢չ����ͼ2��ʾ��
ͼ2 ��������ˮƽ�����˻�����������
2003�꣬�������վ��ͺ�����������ս�ɻ�ϵͳ��Ŀ�ϲ���������“����������սϵͳ”��J-UCAS����Ŀ����ʼ�˶�������ս�ɻ�X-47B���о���2006�꣬�����������“����������ս����ϵͳ”(N-UCAS)��Ŀ��ּ��Ϊ��ĸ���ػ���������������ս�ɻ�����������X-47B��չ�о�����2012—2014��䣬�ֶ������˺�ĸ���䡢�Ž����������ɵ����飬����2015��������������м������顣X-47B���������˻���һ������������ݡ��������ܺ���������½���ͽ��ص�������ս�ɻ����߱��ߺ��̺ߺ�ʱ���ص㣬װ���������״����Ƶ�ϵͳ�Ϳ��״���Ƚ��Ĵ���������Ҫ���ܰ����鱨��졢Ŀ���١�����ս���š���������ȡ��������Ƶ�������������ϵͳ����“ȫ��ӥ”��“��ʳ��”��“����”��“����ѻ”��Ҳ���ھ��ӷ��ۣ���ͼ3��ʾ��
��ɫ�����Ƶ�“����”���˻��䱸�з��״��Ӧ��������Ƶ�ϵͳ�͵����������������з��״�ϵͳ����ͼ3��ʾ��

ͼ3 ������������ϵͳ
������������ϵͳ��ִ������ʱ���ױ����źʹ���Ӷ���������ʧ�ܣ�����������ϵͳ��Ⱥ������ֲ���һȱ�ݣ�����̶ȵط��ӿ�������ϵͳ�����ơ����������Ƚ��о��ƻ��֣�DARPA����Կ�������ϵͳ��Ⱥ�Ⱥ�������“С����”�ͳɱ����˻���Ŀ���ͳɱ����˻���Ⱥ��Ŀ��“ɽ��”��Perdix�������˻����ظ��ٷ�����ʾ��Ŀ�������Է�Ⱥʹ��ս����OFFSET����Ŀ�ȣ�ͨ�������Ͳ�����������ϵͳ��Ⱥ����ϵ�ܹ���ͨ��ϵͳ�Լ��ֲ�ʽ�����㷨����չ�����˻���Ⱥ��������ϵͳ���������˹����ܡ�̬�Ƹ�֪��������ʵ����ǿ��ʵ��ǰ�ؿ�ѧ�����������˿�������ϵͳ��Ⱥ��ս���ϵ��ۺ���ս������
��3����������ϵͳ
��������ϵͳ����ˮ������ϵͳ��ˮ������ϵͳ2�ࡣ���У�ˮ������ϵͳ��Ҫָˮ������ͧ�����¼��“����ͧ”������Ҫ����ִ�к����Ѿȡ������ӡ����������Ѳ�߰��������Ӹ��š����ڱ��Ϻ��ն��д�������ˮ������ϵͳ��Ҫָ����DZ������������DZͧ��ȣ����������Ա����������������������Ե��ŵ㣬��Ҫ����ִ���鱨�Ѽ���Ŀ���⡢ս������������������2018�꣬�����������ˡ�����������ϵͳս��·��ͼ����2019�꣬�ַ����ˡ������˹����ܿ�ܡ���Ϊ������ս�뺣������ϵͳ�ķ�չ�ṩ��·�߹滮��ָ�ϡ�
��ˮ������ϵͳ���棬���������“�����Ƚ��������ʾ��Ŀ”��ACTD��������Ҫ����֮һ���ǿ�չ“˹�ʹ�����”����ͧ���о�������Ŀ����2007����ɣ�����������ս�����������顣“˹�ʹ�����”����ͧ���������˼�ʻϵͳ���Ӿ�/���Ӿ�ͨ��ϵͳ���������е��/��������ת��������������������״ˮ�������״ȫ��λϵͳ���ջ����Ƚ����������Լ����ڡ�������������DZ��Ӧ������������Ҫ����ִ���鱨�Ѽ���Ŀ����ӡ���Ϣ��졢��ˮ�ͺ��ϰ�����������һ���������������������Ƶ�“��������”����ͧ�������������紫�������Լ����ࡢԶ���״�̽��ϵͳ�����չģ�黯����ϵͳ����Ҫ����ִ��ʶ�𡢼�����Ŀ�꣬�����������������������������ϵͳ��ͼ4��ʾ����ɫ�����Ƶ�“������”����ͧ��Ҫ����ִ���鱨��졢����Ŀ����ս�����ء����Ӹ��ź;�ȷ���������ͼ4��������˹���Ƶ�����ˮ�����ͧ������ĸ����ָ����ִ�п���Ѳ������顢����ָ��������Ѱ�鱨��

ͼ4 ������������ϵͳ
��ˮ������ϵͳ���棬����˹���Ƶĺ˶�������DZ����“������”����Я�������Լ��˵�ͷ��ִ�������ս�Ժ˴��������ͼ4��ʾ���������Ƶ�“����”����DZ����������ͨ��������Ƶ��Ų���ɨ��������壬��Ѱ�鱨�����Ƶ�“��ǹ��”-9����DZ������Я�����ֱ��غɣ�������ִ�н�����̽����ˮ�ס����Ӻ���죨ISR��������
2.������������ϵͳ�о���״
���������ҹ�������������ϵͳ��չѸ�٣����Ľ���½������ϵͳ����������ϵͳ�ͺ�������ϵͳ3��������в�����
��½������ϵͳ���棬�����Ƽ���ѧ����һ�ع��ɷ�����˾���Ͽ�����“ɳĮ����”½����������ƽ̨�������Ĵ�Ϊ�����������������ͻ�ǹ������ϵͳ����������ִ�к������䡢��Ա���͡�����⡢�������������ɽ�����ܼ������Ƶ�“����”ϵ�����˳�������ǿ���������Խ���������Ͼ�������ѧ���Ƶ�“����-III”���õ������ܻ�����ϵͳ�����н�ǿ�������������鱨��������������Ƽ���ѧ���������ҵ��ѧ�ȵ�λ�������Ƶ����˼�ʻ�˻���쳵�����нϸߵĻ���������װ�������������ص�����ϵͳ����ִ�л���������߱�һ��������������
�ڿ�������ϵͳ���棬�ɶ��ɻ���ҵ�������Ƶ�“����”ϵ�����˻�����ȫ����ˮƽ��������Ѳ�������������յ�Эͬ���������������������ȣ������ж����/��������豸�Լ�С�Ϳյؾ�ȷ�������������ִ���鱨��졢Ŀ����١���������������ҹ����Ƶ�“�ʺ�”ϵ�����˻������пճ���ʱ�ĺ������������Դ��ص��Ӹ���ϵͳ���������ϵͳ����ִ�л���������鱨��졢ͨ�Ÿ��š��粨���ŵ��������ƵĹ���11�����˻����м�ǿ���������������Դ��ؾ�ȷ���Ƶ�����������ִ�жԵع��������ҹ���������ϵͳ��ͼ5��ʾ��
ͼ5 �ҹ���������ϵͳ
�ں�������ϵͳ��ˮ������ϵͳ���棬�ɹ��������̴�ѧǣͷ���Ƶ�“����һ��”����ͧ�������͵��϶�������ߺ��ٳ���92.6km/h�����1000km��ΪĿǰ��������������ͧ����ͧ�ں���������֪�����ܿ��ơ��������ߵȼ���������ʵ�ֶ���Χ���ӻ����Ŀ���̬����Ϣ��֪��Σ�չ�ܣ���������ִ��������Ϣ��⡢��ò��桢����Ѳ�ߡ��鱨��졢�����������������Ϻ���ѧ���Ƶ�“����”ϵ������ͧ���а�������ȫ��������ҵ����������ִ��Ŀ����졢�����桢ˮ�ʼ����������Ϻ����´�ѧ���Ƶ�“����01”�����ܸ�������ͧ�������к��ײ��״�����״ǰ�����ŵȴ�����������ִ�п���Ŀ����ӡ�ˮ�²����������Ѿȵ����߱�ȫ��������������������������Զ����о����з���JARI����������սͧ�������й��̽����������������̽���豸��ͬʱ���������е�����������ϵͳ������ִ���鱨�Ѽ���������졢������������������麣�������ܿƼ�����˾�ȵ�λ�������Ƶ�“�t���ߢ�”���˵���ͧ��������ȫ�������˼�ʻϵͳ������������������ִ�е�����졢�鱨�Ѽ�������������������ҹ���������ϵͳ��ͼ6��ʾ��

ͼ6 �ҹ���������ϵͳ
�ں�������ϵͳ��ˮ������ϵͳ���棬������ҵ��ѧ���Ƶ�“ħ����”����DZ����Ϊ������������DZˮ�����������1025m������ԡ����������̴�ѧ���Ƶ�“���”��ȫ��������DZ�������ɹ������10896m����DZ��������ҵ���顣�ҹ����Ƶ�“DZ��һ��”��“����”�ŵ��DZˮ�����ѳɹ�����̽������
3.������״�ܽ�
Ŀǰ����������ϵͳ����Ӧ���ھ���Ӧ�õĸ�������������ǰ�ؿ�ѧ�����ķ�չ����������ϵͳ�ھ��������Ӧ�ý��������ࡣ������������ϵͳ��ʹ�÷��棬��δ��ȫʵ�������������ܻ�����ǰ����������ϵͳ�����ھ��������Ӧ����״��Ҫ��Ϊ����3�����֣�
�ٴ���ս����ĽǶȣ���ս�����ִ�м��������������Կ���ս����չ��ս���Կ������˶Կ����˻��Կ�����������Կ���ʽת�䣻Ӧ�û����ɽṹ��������ʵ���һ�������ʵս������ת�䣬����δ����չ����ʵ������������ʵ���ϵ���ǿ��ʵ������
�ڴ�ָ�ӿ��ƵĽǶȣ����Ʒ�ʽ�ӵ�����ң�ء��̿ط�ʽ���˻������ںϽ������Ʒ���չ��������δ��ȫʵ���������ƣ���ϵ�ṹ��ר�û�����һ����ͨ�û����������������Է���չ��
�۴Ӹ�֪���ߵĽǶȣ����߷�ʽ�ɵ�һ������������������Ϊ�����˻����ܽ�������Ϊ���ķ�ʽת�䣻��֪��ʽ�ɵ�һ������������ȡ������Ϣ���������ж�Ŀ������������˹����ܵ�Ŀ��ʶ��������Ϣ��ȡ�ķ�ʽת�䡣
������������ϵͳ�ؼ�����
��������ϵͳ��Ϊ��ѧ������ļ�����ߣ��漰�ļ����ڶִ࣬�е������������Ӧ�ó������Ӷ�䡣���磬���л������ꡢ�������ܼ��ȵͣ��д�硢���ո��ŵȣ�½�ػ������θ��ӣ����ϰ����ڵ����ź�Σ����Ⱦ����ȣ����ϻ����з��˸��š�����ҡ�ڡ�Ŀ�겻�����������߲�����ȡ���ͬ�Ļ�������;����������ϵͳ�����о������ܵķ�������˾���ս��Ϊ��Ӧ���Ķ�价�����ɽ���������ϵͳ�ؼ���������Ϊ���ӻ�����������֪�����⼼�����ೡ����������ѧϰ�����ܿ��Ƽ�����������ȺЭͬ�������˻��������˻��ںϼ��������߹滮�����뵼����λ���������ڽ���Ҫ�Ժ�������ϵͳΪ��������������ϵͳ�ؼ�����������ϸ������
1.���ӻ�����������֪�����⼼��
�ڸ��ӻ����¶Ի�������������֪�볡����������������ϵͳ�ܹ�������ҵ���γ���ս������ǰ�ᣬ��ֱ��Ӱ�������ܷ�ɹ���ɡ����ʵ�ʻ����ĸ��Ӷ�䣬�����Ǻ��滷���ķ��˸��ż�����ҡ�ε����ѣ���������ϵͳ��Ҫ���Ŀ������ѡ���֪����ȡ��ģ̬��Ϣ��������Ϣ�������������Ŀ�ꡣ��ˣ����ӻ����µ���������ϵͳ����������֪�����⼼����ͻ�ƶ�ģ̬�������ں�������֪�������Լ����ӳ���Ŀ��ʶ�������⼼����
��1����ģ̬�����ں�������֪����
Ŀǰ����������ϵͳ���ص���Ϣ��ȡ��������Ҫ���������״���ײ��״�����״����غɵȡ���һ��������ֱ�ӻ�ȡ�߾��ȡ����ܵij�����ά��Ϣ�����о��ഫ�����ںϵĻ���������֪�������Ӷ�Ϊ���������ṩ֧�š��ഫ�����ں��ǽ����ִ��������ж��Ρ���ռ����Ϣ�������Ż���ϴ��������ղ����Թ۲����һ���Խ��͡��ڴ˹����У�Ҫ������ö�Դ���ݽ��к�����֧����ʹ�ã�����Ϣ�ںϵ�����Ŀ�����ǻ��ڸ���������õķ���۲���Ϣ��ͨ������Ϣ�༶�𡢶����ϵ����������õ���Ϣ��ͨ�����ö���������Эͬ���������ƣ��ۺϴ���������ϢԴ�����ݣ��Ӷ��������������ϵͳ�����ܻ���������Ȼ�������½������л�����Ϊ���ӣ����ٴ����ľ���ҡ�ڡ����˸��š����ղ�����Ŀ�겻�������������ս��������������ϵͳ��Ҫ����ÿ�ִ������Ķ�����������ָ��Ŀ����жഫ������Ϣ�ںϴ�����Ȼ��������ϵͳ�ڲ�������Ԫ�밶��֧��ϵͳ�ĵ��Ӻ�ͼ��Ϣ���������滷����ά����̬��ͼ��ִ�ж�ָ��Ŀ��ĸ��١���⡢ʶ������֪��������ʵ�ֺ�����������ϵͳ�Ժ��滷����������֪���������⡣
��2�����ӳ���Ŀ��ʶ�������⼼��
��������ϵͳ�߱���ҵ�����ԵĹؼ���������Ч���ⳡ����Ŀ����Ϣ����ȷ���ⳡ����Ϣ��Ҫ����Ŀ��������Ϣ�����볡���ı���Ϣ���������½������л�����������Ȼ�������ٷ��˸��š��������ҡ�ڵȶ��ص����ѣ���Ϊ��������ϵͳ�������������Ϣ��ȷʶ��ָ��Ŀ���������ս��������������ϵͳ���صļ����״������������ȴ����������Ի�ú���������ԭʼ������Ϣ��ͼ��������Ϣ�����û��ڵ��ơ�������ͼ���ںϵ���άĿ���ⷽ������ά��������ָ���ȣ�����ʵ����������ϵͳ�Գ�����Ϣ��������֪����ָ��Ŀ���ȷʶ��
���ڵ��Ƶķ�����Ҫ����2�֣���������������صķ������Լ����ڵ�ķ�����������������صķ������������ػ������ͼ������ȡ�ĺ��治����ĵ���ת���ɹ���ı�����ʽ��Ȼ����ȡ�������������ڵ�ķ�������ֱ���ڻ�ȡ�ĺ���ԭʼ��������ȡĿ�����������ڵ�����ͼ���ںϵ���άĿ���ⷽ�����ǽ������״��õĺ��泡����Ŀ��ľ�ȷ�����뺣��ͼ���ṩ�Ļ�����������ɫ��Ϣ���ϣ�����������������������ϵͳ�Ժ���Ŀ��ľ�ȷʶ����ȷ�����������⡣
2.��Ϊ������켣�滮����
��ʵ�ʵġ����ӵ�ս�������У�������������ϵͳ���ٵĸ������������������ͻ�ƶ�Դ�칹�����µ���Ϊ����������/�������µĹ켣�滮�����븴�ӳ����µĹ켣���ټ�����
��1����Դ�칹�����µ���Ϊ������
��Ϊ��������������ϵͳʵ���������ƵĹؼ���������ͧ��ͬ�ٶȡ���ͬ��Ծ��롢��ͬ�������͵ĸ��ӻ����£���Ҫȷ��ȡ��Ч��Ϣ��Ϊ����ͧ��һʱ�̵ľ���������ȫ�ɿ��Ŀ���ָ����ȣ���ȡ�����д����ԵĻ���������Ϣ�������㹻�����뾫ȷ�궨��ѧϰ���ݼ���Ȼ�����������������ľ������������ý��������ݿ����ѧϰ��������û���ѧϰ�㷨�Թ����ľ����������Ż�����һ����߾��߾��ȡ�
��2����/�������µĹ켣�滮����
�켣�任������ͧ������DZ�������������Ϊ���ڸ��ӵ�ս�������£����ݲ�ͬ�Ļ���״���滮��һ�����С��ɿ��Ĺ켣������ͧ������DZ����ʵ��������ʻ�Ĺؼ����ü�����Ҫ�������ڶ���ʽ�Ĺ켣�滮���������ڶ�Ŀ��Լ���Ĺ켣�滮������������������β�����ٶȵĹ켣�滮������
��3�����ӳ����µĹ켣���ټ���
�Թ滮��������켣���и���������ͧ������DZ��������Ҫ������ؼ����ڽ������ͧ������DZ��������Ŀ��켣����ʱ�ĸ߾�������ȶ��Կ������⡣��Ҫ�������Ϊ����������ͧ������DZ�������˶�ѧ�붯��ѧģ�ͣ������Ӧ��ִ������������ʵ�ֶ�ָ��Ŀ���ʵʱ��ȷ���棬�ڱ�֤���پ��ȵ�ǰ���£�ʵ������ͧ������DZ��������������ת�����������ģ���ִ����֮���Э�����ơ�
3.�������������
������λϵͳ����������ϵͳ�Ĺؼ���ɲ��֣�������ṩ�����ɿ����й�����ͧ������DZ�������ٶ���λ�õ���Ϣ������ϵͳһ���������ǡ����ټơ����ǽ���������ɣ����ָ����Ӿ�ģ�飬���ǻ���ʵ�ʸ��ӵĻ��������������ռ�λ��ͼ��������Ϣ�������ȡ���������ϵͳҪʵ������ľ�ִ�У�����ͻ�ƻ��ڹ���/���������Ϣ�ںϵ�����λ���������ڹ���/������Ϣ�ںϵ�����λ�����������Ӿ����ٵĵ������������������������������
��1�����ڹ���/���������Ϣ�ںϵĵ�����λ����
�ü����ǽ�����ͧ�Ĺ�����Ϣ���������ز�/�뻷·��Ȼ������ȫ��������ʱ���߾��ȵĹ�����Ϣ�������ǽ��ջ��źŵĸ��£��Ӷ�ʵ������ͧ�Ĺ��Ե��������ǵ��������ƻ����������ںϡ�
��2�����ڹ���/������Ϣ�ںϵĵ�����λ����
�������ĵĵ���ϵͳ���и��������벻���ܸ��ŵ����ƣ�ͨ���������ĵ����������Ϣ���ʼλ���ṩ����Ϣ���������������ͧ��λ�á������Ե�����Ϣ�����ĵ�����Ϣ���ںϣ�����������ĵ�����λ��³���ԡ��������ĵ��������Ĺ���/������϶�λ�����ѳ�Ϊ����ϵͳ������������Ĺؼ����֡�
��3�������Ӿ����ٵĵ�������
����ʵ��ս�������ĸ����ԣ�����ͧ�ᴦ�ڸ��ӵĹ��������У������ܵ������Ŷ�����GPS��ֹ��������Ӷ�ʹ����ϵͳ���������״̬�������Ĺ��Ե���ϵͳ���Ƚϵͣ�����������ʱ��Ĵ����Ե�����ʹ����ͧʧȥִ��������������������Ӿ��ķ���ȴû��ʱ��������ۣ�ֻ����ȡ��������������ͼ��Ĺؼ�����������ͨ���Ӿ��㷨������֪ʶ�������ͧ������DZ������λ����Ϣ�������Ӿ��ĵ����㷨�����ܵ����ţ�³���Խ�ǿ�������ֲ���GPS��ֹ�������ɴ����Ե��������������ۣ����㷺Ӧ�á�
��4����������������������
���ں�����صĻ���������DZ�����賤ʱ����ˮ�º��У���������ȡʵʱ��ȷ�������ź���������Ϣ�����⣬����ˮ�¹����������⣬�����Ӿ��ĵ�������Ҳ�ܵ����ơ���ˣ�ͨ����ú����ڲ�������ռ�λ��ͼ������������DZ�������ص�������������ȡ��ʵ�س�����Ϣ������ƥ�䣬����ʵ������DZ�����ĸ߾�������������
�������ÿ���ĺ�����еĵ����������Ե�ʱ�շֲ��������������������������ռ�λ��ͼ��ͨ��������DZ���������ص��������Դ�����ʵ�ػ�ȡ������������Ϣ��Ԥ�ȴ��صĿռ�λ��ͼ��ƥ�䣬���Ի������DZ�����ĸ߾��ȶ�λ��ʵ������DZ�����ĸ߾�������������
4.�ೡ����������ѧϰ�����ܿ��Ƽ���
�ೡ�����ܿ��Ƽ�������������ϵͳ������ӡ����Ϳ��ƶ����ȶ�������Ĺؼ�����������������ϵͳ��Ӧ���������������Ч���ߡ��ڸ��ӵĺ����£���������ϵͳҪ���ʵʱ��ȷ�������ء�Ŀ����١���Ϣ��ȡ�뾫������ͱ���ͻ���������������ѧϰ������������ҵ�������Ƽ������Լ��������ܿ��Ƶ�����ϵͳ�˶����Ƽ�����
��1���������������ѧϰ����
��������ѧϰ��ָ������ϵͳ����罻���Ĺ����У���������֪ʶ��������ѧϰ���������Ĺ��̡�����ϵͳ��ҵ���ܵ�����ѧϰ������ģ����ѧϰ��֪�IJ��ֹ��̡���������ϵͳ���û������ǿ��ѧϰ�ļ����������ѧϰ�ĸ�֪������ǿ��ѧϰ�ľ����������ϣ���ʵ���ں��渴�ӻ����´Ӹ�γ�ȵ�ԭʼ������Ϣ���뵽���������ֱ�ӿ��ơ���������ϵͳ��������ѧϰ��Ҫ����3�����棺һ�ǶԺ�������뺣���ڲ��ĸ��ӻ��������������������Χ�����ij�ʼ״̬������Ϣ�����ǻ�����������ϵͳ�뺣�������ڲ����ӻ�����������ʽ���������ǿ��ѧϰ����ѧ��ģ�������������ѧϰ���̵�״̬��ֵ��������Ʋ��Ժ����ȹؼ���Ϣ������������������ϵͳ�뺣�������ڲ����ӻ�����������õ�������Ϣ����״̬��ֵ���������Ʋ��Ժ������и��£���ʹ������������ϵͳѧϰ�����ŵĿ��Ʋ��ԡ�
��2��������ҵ�������Ƽ���
��������ϵͳ�����������ѧϰ����ƹ����У���Ҫ�뺣�������ڲ����ӻ����Ӵ��γ����õ����ϵͳ���Ա�֤�Ժ���������ڲ����ӻ�����Ϣ��ʵʱ��ȷ��ȡ������ȷ�����ٽ�������ͧ������DZ�����ĺ��й滮���������п��������������ײ�ȡ���������ϵͳ������ҵ�������Ƽ�����������Ҫ��������������ϵͳ������������Ʋ��Ե���ƣ�����������ڲ����ӻ����Ľ�ģ����������ͧ������DZ��������ҵ����Ķ���ѧ���߽�ģ������������������ڲ����ӻ�����������Լ���Ķ�̬���ɼ��������Ʒ�����
��3���������ܿ��Ƶ�����ϵͳ�˶����Ƽ���
�������ܿ��Ƶ�����ϵͳ�˶����Ƽ����ǽ��˹������봫ͳ���Ʒ������ϣ��Խ����ʵ�ʸ��ӵĺ���ս�������£�����ͧ������DZ�������ȶ���ȷ�������⣬��Ҫ��������ϵͳ���ܿ����㷨�����������ϵͳ���ܿ��Ʋ��Ե����2�����档����ϵͳ���ܿ����㷨�����Ҫ�������ֲ����Ϣ�����;����������ߵ�������ʶ���������䣻��/�ջ����ơ���/�����������Լ����Ծ����붨���������ϵĶ�ģ̬���ƣ�����ʽֱ�������������á�����ϵͳ���ܿ��Ʋ������������ƺ���������ͧ��������DZ�����ķ�����������ʵ�ʵ���������
5.���˼�ȺЭͬ���Ƽ���
��ʵ�ʵ���ս�����У�����ս�������ĸ�����������Ķ����ԣ���������ͧ��������DZ����ͨ����������ʵ�����������������ͧ������DZ�������ص��豸�������ޣ���֪�ӽ�������Χ����ȫ�棬������ִ���������鱨̽�⡢Ŀ����١�ս��������֪��ȫ������������ʱ������ȷ�볹�ף���ˣ��ɶ�������ͧ������DZ������ɵ���������ϵͳ��ȺЭִͬ������ͳ�Ϊ��Ȼ�����ơ�Ҫ��ɶ���������ϵͳ��Ⱥ�Ŀ��ƣ���Ҫͻ����������ϵͳ��Ⱥ�ֲ�������Ƽ�������������ϵͳ��Ⱥ�����Ƽ�������������ϵͳ��Ⱥ�캽���Ƽ����Լ���������ϵͳ�˹��Ƴ����Ƽ�����
��1����������ϵͳ��Ⱥ�ֲ�������Ƽ���
���ھֲ�����Ŀ��Ƽ�������������ϵͳ�������ͧ������DZ������Ⱥ���ƵĻ�����������Ҫ���ڶ�����ͧ������DZ������Ⱥ�ڲ�����ֲ����ƹ����ָ�����ֲ�������Ƽ�����һ���̶���ʵ���˶Ժ�������ϵͳ��Ⱥ�����ܿ��ƣ����Ƕ��ں�������ϵͳ��Ⱥ��Ϊ�뼯Ⱥģ��֮��IJ�������Ҫ���д�����ʵ������ã����ҶԲ�����ȡֵҲ�dz����С����ԣ�Ҫʵ�ֶ���������ϵͳ��ȫ�����ܿ��ƣ����踨��������������
��2����������ϵͳ��Ⱥ�����Ƽ���
��������ϵͳ��Ⱥ�������Ƽ�����Ҫ����2������һ������������ϵͳ��Ⱥ�У�����֮��Ŀ��ƹ������Ҫ������ÿ������ͧ������DZ�����Ŀ������ڲ�����������������������ϵͳ��Ⱥ����Ⱥ����Ϊ�ı�Ҫ������������������ϵͳ��Ⱥ���õ��Ǿֲ�ͨ�Ų��ԣ����ż�Ⱥϵͳ������ͧ������DZ���������ӣ�����Ӱ�쵽������������ϵͳ��Ⱥ��״̬��
�����Ʒ������ڲ��ƻ���������ϵͳ��Ⱥ�ڲ�����ͧ������DZ������������ǰ���£�����һ�������µ�����ͧ��������DZ��������Щ����ͧ������DZ��������ͬ���ľֲ�����������������������ϵͳ��Ⱥ���ж����������ɿأ����Խ����ⲿָ��ڽ���ָ�����Щ����ͧ������DZ���������������Ӧ��������������ϵͳ��Ⱥ�������Ʒ�����������ϵͳ�ֲ����ƹ���Ļ����ϣ�����һ�����Կ��Ƶ�����ͧ������DZ������ʹ�����������ϵͳ��Ⱥ����Ӱ�죬������ɶ�������������ϵͳȺ��Ŀ��ơ�
��3����������ϵͳ��Ⱥ�캽���Ƽ���
��������ϵͳ��Ⱥ�캽���Ƽ����Ļ��������ǣ�������������������ϵͳ��Ⱥ���屣�־ֲ������ǰ���£��Ⱥ����������ͧ������DZ����ӵ�и������Ϣ����ǿ����Ϣ����������������������ͧ������DZ����ͨ���ֲ���Ϣ���������쵼�ߵ����ã��Ӷ��ﵽ����������������ϵͳ��Ⱥ��Ŀ�ġ�
��4����������ϵͳ�˹��Ƴ����Ƽ���
����������ϵͳ��Ⱥ�����У�ֻ���ھֲ�����Ŀ��Ƽ���������ɶ�ս��ȷ��ʵʱ�ĸ�֪���Լ����鱨��Ϣ���Ѽ���ȡ���Կ���Ŀ��ĸ���ʶ��ͶԵз�����ľ�������˹��Ƴ����Ƽ����ǽ�����ѧ�е����ܳ�����������������ϵͳ��Ⱥ�Ŀ����У������ƺ�����ģ��Ӱ�쵥������ͧ������DZ�������ڡ������ã���ϵͳ��Ⱥ�еĵ�������ͧ������DZ���������ƺ������������ж�������ͨ���ƺ���ʵ�ֶ�������������ϵͳ�Ŀ��ơ�
6.��Ȼ�˻���������
��ʵ�ʵ�ս�������У���������ϵͳ�����Ų��������ӡ��������ܻ�ˮƽ�͡�ѵ�����մ��ҳɱ��ߡ��豸ʹ����ά��Ч�ʵ͵����⣬����������£�����Ҫ�����������ϵͳ�豸�Ŀɲٿ��������ܻ�����Ҫͻ����������ϵͳ�˻�������������������ϵͳ��ǿ��ʵ������ʵ�����Լ���������ϵͳ�Ի��ӿڼ�����
��1����������ϵͳ�˻���������
��������ϵͳ�˻�����������ָָ��ƽ̨ͨ��ͼ���������������ȡָսԱ��ͼ����������Ϣ��Ȼ������ͼ��ָ��Ե��⡢ͼ��ʶ����㷨��ȡ��ָսԱ�����������Ƶȹؼ���Ϣ��������û������ѧϰ���㷨���ָսԱ��������Ϣ�����ݸ�ָ��ƽ̨���Ӷ���ָսԱ��ָ���·����¼���ս��λ����������ϵͳ���˻����������������������������ܻ��Լ��������̵��ݴ�����³���ԣ��Ӷ�ʹָսԱ��ָ���ܹ������ȶ�����Ч���·�����ս��λ��
��2����������ϵͳ��ǿ��ʵ������ʵ����
��������ϵͳ��ǿ��ʵ�����ǽ���������ɵ�ͼ���������ʵ�ĸ�����ս�����У���������ϵͳ�����ʵ��������ͨ����ʵ����ս�����г������ⳡ������Ϣ������ʵ����ս������������������ָսԱ֮�����һ��������������Ϣ��·���Ӷ�����ָսԱ����ս�����������ʵ�С���������ϵͳ������ʵ����ǿ��ʵ��Ϊ����ʽ�˻�������������Ҫ��չ�������ж��ֲ�ͬ����ʵ��սӦ�ó�����������Ч����ѵ��ʱ�ijɱ�����գ������սʱ�豸��ʹ����ά��Ч�ʡ�
��3����������ϵͳ�Ի��ӿڼ���
�Ի��ӿڵ���Ҫ�����Dz������ڽ���˼ά�ʱ������һϵ���Ե粨�źš���ʵ����ս�����У���������ϵͳ�Ի��ӿڼ���ͨ����ָսԱ���Ե粨�źŽ���������ȡ�����ܷ��࣬�Ӷ�����ָսԱ����ͼ��������Ӧ�ľ��ߣ��Դ�Ӧ�Ը��ӵ���ս������ͻ���������������ϵͳ�Ի��ӿڼ���������ǿָսԱ����֪�������������������Ի��������Կؼ���������ָսԱ�ڽ���˼ά��ͬʱ�����ܲٿض�������ͧ������DZ������������ս�豸��������
������������ϵͳδ���ķ�չ����
��������ϵͳ���������˻��������ԡ������Ե��ŵ㣬��������δ��ս���ĸ������䣬��������е�ս����������࣬������벻ͬ��ս��������������������ϵͳ�����ٶ���ؼ��Ե����⣬ʹ�䷢չ�ܵ���Լ����������ϵͳ���ٵĹؼ���������Ҫ�У�
�ٻ����߶ȸ��ӡ���������ϵͳ�����Ӧ�û���������Խ��Խ���Ҫ�أ��ǽṹ���������ڱ����ڶࡢ��֪�ӵ㼰��Χ���ȶ���������ϵͳ�Ļ�����֪��������˸��ߵ�Ҫ��
�ڲ��ĸ߶Կ�����������ϵͳ��ս��������ȡ��ս�����Ƶ���Ҫ�ֶΣ���ս˫�����ҵĻ����Կ����Լ���з���ս�����������������Ŷ���������ϵͳ�Ļ�����������������µ���ս��
����Ӧ��ʵʱ����δ��ս���У���ս̬�Ʊ仯���ң���ս��ʽ����������䣬�輰ʱӦ��ս��ͻ���¼�����Ͷ���������ϵͳ��ʵʱ��Ӧ����������µ�Ҫ��
����Ϣ����������δ��ս���У���ս�������������Լ��з����ŵĴ��ڣ���������ϵͳ����Ϣ��ȡ���������ܵ���Լ���Ӷ����̬�Ƹ�֪���걸��ս��̬����Ϣ���ݶ�ʧ��˥����������������ȡ����˫������Ϣ��
�ݱ߽粻ȷ������������ϵͳ��������ս��ʽ�߸��˴�ͳ��սģʽ��δ��������ս��½������һ�廯���Լ�ͨ�������߶Ƚ��ڴ�����������飬��������������ϵͳ��������ս����Ӱ�죬�Ӷ������ս�߽�IJ�ȷ���ԡ�
�������Ͻ������ٵĸ������⣬δ����������ϵͳ�ķ�չ�������ڸ���������ǿ�뼯Ⱥ������ǿ2�����档����������ǿ��Ҫ�����ڸ�����֪���ܡ�����������ҵ���㷨оƬ���ȷ��棻��Ⱥ������ǿ����Ҫ������ͨ��ͨ�û��ܹ������������ԣ��Լ�����Эͬ��ս�����簲ȫ���˻�������ܵȷ��档
1.��֪������Ӧ��������
Ϊ�����������ϵͳ�ڸ߶ȸ��ӻ����µ���Ӧ��������Ҫ��ǿ��������ϵͳ�ĸ�����֪���ܡ�������֪������ǿ��Ҫ�����ڴӸ����֪��������֪���ܵ�ת�䷽�棬�ۺϻ�ȡ�Ķ�Դ������Ϣʹ����������ϵͳ�߱�������������⡢�����������жϷ��������߹滮������������������������ϵͳ������֪���ܵķ�չ�����Կ�ѧ�ͷ���ѧ��Ϊ������ͨ�����֪ʶͼ�ס��˹����ܡ�֪ʶ�������������ܵȼ�����ʵ�ֻ�ȡ��Ϣ������������ȷ���ã��Ӷ�������������ϵͳ��ͻ���¼��ĸ�ʵʱ��Ӧ������
2.������ҵ����������������
Ϊ�����������ϵͳ�ڸ߶ȸ��ӻ��������ٵĸ߶ȸ�����������⣬��Ҫ��ߵ�����������ҵ���������������������ǿ��ѧϰ�ľ��߷����������Ӿ���������������Դ��Ϣ������������֪�뽻����������������ѧ�Ļ����������˶��滮�������Լ������˹����ܵ�������ҵ�����ȣ���������������ϵͳ���������������ģ�붨λ�������������������������滮��������������������ʹ��������ϵͳ�ܹ���Ӧ���ӵĻ�������չ������ҵ����
3.�㷨оƬ��ʵ�ָ�ʵʱ��Ӧ
��������ϵͳ���ٵĸ��ӻ������㷨����������˽ϸ�Ҫ����Ҫ��ʵʱ���ټ��㣬ʵ�ֶ�ս��ͻ���¼��ĸ�ʵʱ��Ӧ��Ϊ��������⣬��Ҫ�����������ϵͳ�����㷨��оƬ��ˮƽ�����������ͼܹ��Ĵ���һ��оƬ�������оƬ���������㷨оƬ��ˮƽ�����о������˹�����������оƬ��ͨ���ı�����оƬ�Ķ����Ƽ��㷽ʽ�������ݶ��źŻ�Ȩ���ź���ʹоƬ��ģ����Ԫ�ķ�ʽ���й�����ģ�������Ч�������������IJ��м���������ó���������IJ��м����������Ӷ����������оƬ���������㷨оƬ��ˮƽ�������������ϵͳ�ĸ�ʵʱ��Ӧ���⡣
4.ͨ�û��ļܹ�������Ⱥ��������
Ϊ�����������ϵͳ���ٸ߶ȸ��ӻ�������Ӧ�������Լ���������ϵͳ��ά�ޱ���Ч�ʣ�δ����������ϵͳ��������չ������ָ�ؿ�ܣ�����˻�Э���������Բ����ϵͳ��ģ�黯�̶ȡ���Ҫ�����ڣ�
�ٿ���ͨ��ʽ���˹����ܿ�ܣ�֧���������֮����������ȷ��ʵʱ�����������Э����ϵ��
�������������ϵͳ��ģ�黯�벿�������ԣ���֧����δ��ս���ж���������ϵͳ�����Ա���еĿ���ά��������������
��������ݴ���һ�廯ˮƽ���Լ���δ��ս�������ݴ���Ŀ������������������ݵı��ػ��ʡ�
5.����Эͬ���Ƽ�ȺӦ�ñ߽�
Ϊ�����������ϵͳ�ڸ߶ȸ��ӻ����µ���Ӧ�����������սʱ�ı߽粻ȷ�����⣬��Ҫ�����������ϵͳ�Ŀ���Эͬ��ս���������ֲ���һ��ս�������IJ��㡣��ͨ����������ϵͳ�Ŀ���Эͬ��ս������������������ƻ����������ÿ�������ϵͳ��������Χ��ͨ�ž���Զ���ŵ㣬�Լ�½������ϵͳ�뺣������ϵͳ����ʱ�䳤���ȶ���ǿ���ŵ㣬����ͬ��������ƽ�����ϣ���������������ϵͳ�Ķ�ά�ռ���Ϣ��֪�������������ʶ�������Эͬϵͳ���Ӷ������������ϵͳ��ɸ��������������
6.��ȫ���籣�ϼ�Ⱥ�ɿ�Ӧ��
��������ϵͳ��δ��ս������������Ϣ�������벩�ĸ߶Կ������⣬�����Ҫ�����������ϵͳ�ڸ߶Կ������µ����簲ȫ���������������Ӧ�Ը߸��ӡ��߱仯����ʱ������������ٸ�ǿ�����繥��ʱ���ȶ��ԡ��Կ����������簲ȫ����������������Ҫ���������¼������棺
�ٹ滮����������Ȩ�ޣ��Ա�֤���ݵİ�ȫ��������ִ�е�����ԣ�
�������Ϣ����������������������������ϵͳ����Ϣ���ϲ�Ʒ��������Ϣ��ը�����Ӧ�Ծ��ߣ�
�������������ȷ���������ͳһ���簲ȫ�ı���ȼ���������������������ԣ�������繥��������Ŀ����������
7.�˻�������������Կ�����
Ϊ�����δ��ս�������ٵĸ�ʵʱ��Ӧ�����⣬�����������ϵͳ�ڸ߶ȸ��ӻ����µ���Ӧ��������Ҫ��������������ŵ���н�ϣ�����һ���µ��˻�Э���Ļ�����ܷ�ʽ������չ��������ϵͳ���˻�������ܡ���������ϵͳ�˻����������һ�����ˡ���������ϵͳ����õ��µ��������������ϵ����ܿ�ѧ��ϵ�������������ϵͳ��δ��ս�������ٵĸ߸��ӻ������ʵʱ��Ӧ�����⣬δ���˻�������ܵķ�չ��Ҫ���������¼����棺
����Ϣ�������롣�ڻ�ȡ��Ϣ������ˣ�������ϵͳ�豸�������۲ɼ�����Ϣ��������սָ����Ա�����۸�֪��Ϣ���ϣ�����һ�ֶ�ά����Ϣ��ȡ����Ϣ���뷽ʽ��
����Ϣ�����ںϡ���ȡ����ά��������Ϣ��ͨ����������ļ�����������սָ����Ա����Ϣ��֪���ںϣ�����һ���µ���������;����
����Ϣ�����������������Ϣ�����ںϴ���֮��������ļ���������սָ����Ա�ļ�ֵ�����ƥ�䣬�Ӷ��γ��л���ϵĸ��ʻ�������Ż��жϡ�
�ġ�����
��������ϵͳ�����������ԡ������������˻����ص㣬��δ��ս���Ͻ�����������Ҫ�����ã���������ϵͳ�ķ�չҲ���������ܼ��㡢���ܽ�ͨ���������졢�ǻ�ҽ�ơ����Կ�ѧ��ѧ������ķ�չ�����Ӧ��ʵ�ʸ��ӻ���ս������������Ϊ������˹����ܵ�ǰ��ѧ�Ƶ��Ƚ�����������������ϵͳ�������嶥��滮����½�ء������Լ���������ϵͳ�в�ͬ������ϵͳ��սƽ̨�ϣ���֤�ɿ��Ļ������ܸ�֪�����ܼ����豸���������ɿ����ȶ�������ϵͳ�������ơ����ܸ�֪�����ܾ��������ܽ����ȹؼ�������������������ϵͳ�Ĺؼ����⣬���������������ϵͳ���������ơ����ܸ�֪�����ܾ���������